Seminar index
3月15日13時に第15期公募情報を公開いたしました。
4月1日13時より応募者登録サイトへの登録が可能です。
Information on the 15th call for applications was opened at 13:00 on 15 March.
Applicants can register on the registration website from 1 April at 13:00.
84th Hakubi Seminar
Information Processing via Soft Body Dynamics
- Speaker:Kohei Nakajima (The Hakubi Center for Advanced Research)
- Date:7th October 2014 (Tuesday), 16:00-
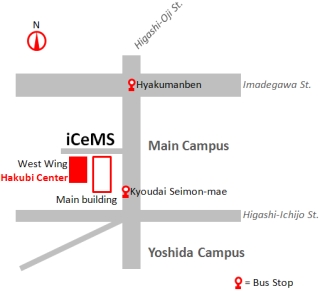
- Venue:The Hakubi Center for Advanced Research (iCeMS West Wing 2F, Seminar Room)
- Presentation Language:Japanese
Summary
A new family of devices that incorporates soft materials, “soft machines,” have been developed with increasing regularity in recent years. These robots have significant advantages over traditional articulated robots due to deformable morphology and safety in interaction, which make them applicable for rescue and human interactions. However, their dynamics are often complex and difficult to control due to their intrinsic non-linearity, elasticity, and high-dimensionality. In this presentation, we will show that these seemingly undesired properties can, in fact, be highly beneficial, in that they can be employed for real-time computation. Using a physical platform consisting of a soft silicone arm, we demonstrate through a number of experiments that body dynamics generated by the arm can be used as a computational resource and, in particular, that they can be exploited to control the arm's motions robustly in a closed-loop manner. Our results suggest that the soft body dynamics have a comparable computational capability with conventional recurrent neural networks. In the presentation, the implications and impacts of our results to multiple fields, such as neuroscience and information science, will also be discussed.